机器人课程总结 | Robotics
六关节机械臂ROS仿真与实验
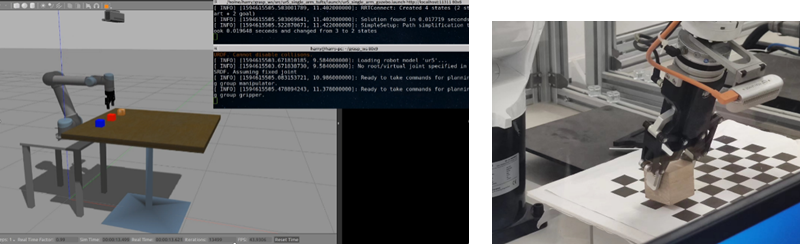
In industrial applications, robotic arms with multiple joints possess a high degree of freedom, necessitating the spatial modeling of nodes and linkages, known as the DH (Denavit-Hartenberg) parameter table. Euler coordinate transformations are applied to convert joint space into Cartesian coordinate space to accomplish specific operational tasks. Figure 1 showcases a classic 6DOF (Degrees of Freedom) robot and a recognition and grasping task based on GAZEBO machine vision.
运用手势识别的机械臂位姿控制
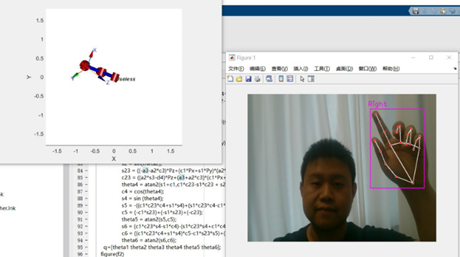
After the robotic arm modeling is complete, the classic PID algorithm from automatic control theory, integrated with computer vision (CV), can be employed to control a three-jointed robotic arm using hand gestures. As shown in Figure 2, the robotic arm rapidly adjusts its end position in response to the recognized different gestures and orientations
SLAM技术与无人车控制
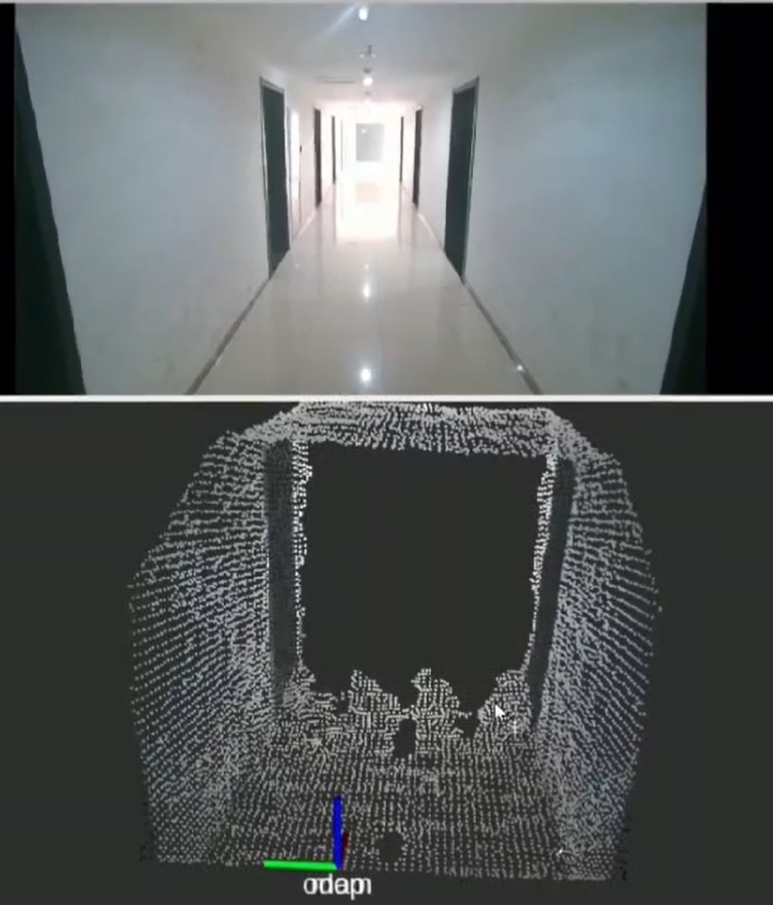
SLAM (Simultaneous Localization and Mapping) technology is a computational method that enables a robot or an autonomous vehicle to map its environment while simultaneously keeping track of its own location within that environment. SLAM is critical in the fields of robotics and autonomous systems, as it allows for navigation in unknown spaces without the need for external references like GPS
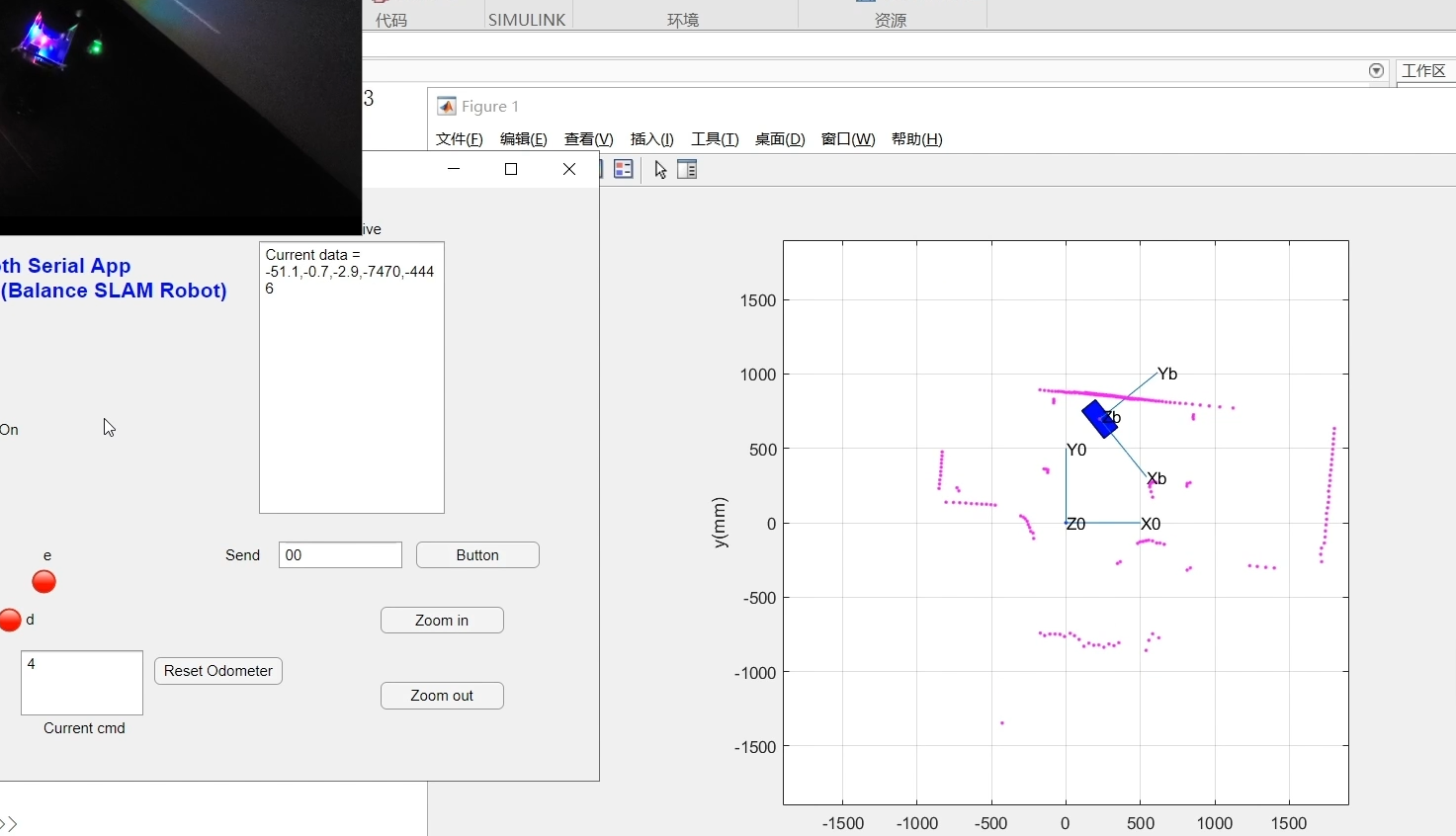
We have conducted map construction of the academic building and controlled the movement of an intelligent vehicle accordingly. This process likely involved using SLAM technology to enable the smart car to navigate through the building, creating a map as it moved along.